人工智能实践-Tensorflow笔记-MOOC-第五讲卷积神经网络
[TOC]
人工智能实践-Tensorflow笔记-MOOC-第五讲卷积神经网络 卷积核计算过程 全连接NN:每个神经元与前后相邻层的每一个神经元都有连接关系,输入是特征,输出为预测的结果。
全连接网络对识别和预测都有非常好的效果,可以实现分类和预测。
全连接网络的参数个数为:
如下图所示,针对一张分辨率仅为 28 28 的黑白图像(像素值个数为 28 28 * 1 = 784),全连接网络的参数总量就有将近 10 万个。
在实际应用中,图像的分辨率远高于此,且大多数是彩色图像,如下图所示。
虽然全连接网络一般被认为是分类预测的最佳网络,但待优化的参数过多,容易导致模型过拟合。
为了解决参数量过大而导致模型过拟合的问题,一般不会将原始图像直接输入,而是先对图像进行特征提取,再将提取到的特征输入全连接网络,如下图所示,就是将汽车图片经过多次特征提取后再喂入全连接网络。
卷积计算可认为是一种有效提取图像特征的方法。
一般会用一个正方形的卷积核,按指定步长, 在输入特征图上滑动, 遍历输入特征图中的每个像素点。每一个步长,卷积核会与输入特征图出现重合区域,重合区域对应元素相乘、求和再加上偏置项得到输出特征的一个像素点。
如果输入是灰度图,使用单通道卷积核。
如果输入特征是三通道彩色图,可以使用 3 3 3 的卷积核,或者 5 5 3 的卷积核。
要使卷积核的通道数与输入特征图的通道数一致,要想卷积核与输入特征图对应点匹配上,必须让卷积核的深度与输入特征图的深度一致。
输入特征图的深度(channel数),决定了当前层卷积核的深度;
由于每个卷积核在卷积计算后会得到一张输出特征图,当前层使用了几个卷积核,就有几张输出特征图;当前层卷积核的个数,决定了当前层输出特征图的深度。
如果某层模型的特征提取能力不足,可以在这一层多用几个卷积核提高这一层的特征提取能力。
每一个小颗粒都存储一个带训练的参数。在执行卷积计算时,卷积核里的参数都是固定的。在每次反向传播时,这些小颗粒中存储的带训练参数,会被梯度下降法更新,卷积就是利用立体卷积核,实现了参数的空间共享。
对于输入图是单通道的,选择单通道卷积核,这个例子的输入特征图是5行5列单通道,选用3 * 3单通道卷积核,滑动步长是1,在输入图上滑动,每滑动一步,输入特征图与卷积核里的9个元素重合,他们对应元素相乘求和再加上偏置项b
对于输入特征图是三通道的,选择3通道卷积核,该例子输入特征图是5行5列红绿蓝三通道数据,选用3 * 3 三通道卷积核,滑动步长是1,在这个输入特征上滑动,每滑动一步,输入特征图与卷积核里的27个元素重合,对应元素相乘再加上偏置项b,得到输出特则图中的一个像素值。
卷积核在输入特征图上按指定步长滑动,每个步长,卷积核会与输入特征图上部分像素点重合,重合区域,输入特征图与卷积核对应元素相乘求和,得到输出特征图中的一个像素点,当输入特征图被遍历完成,得到一张输出特征图,完成了一个卷积核的卷积计算过程。当有n个卷积核时,会有n张输出特征图,叠加在这张输出特征图的后边。https://mlnotebook.github.io/post/CNN1/
输出特征尺寸计算: 在了解神经网络中卷积计算的整个过程后, 就可以对输出特征图的尺寸进行计算,如上图所示, 5 × 5 的图像经过 3 × 3 大小的卷积核做卷积计算后输出特征尺寸为 3 × 3。
感受野 感受野(Receptive Field):卷积神经网络各输出特征图中的每个像素点,在原始输入图片上映射区域的大小。
如果对 5 5 的原始图片用黄色的 3 3 卷积核作用,会输出绿色这样一个 3 3 的输出特征图,输出特征图上的每个像素点,映射到原始图片是 3 3 的区域,所以它的感受野是3。
对 3 3 的特征图用绿色的 3 3卷积核作用,会输出一个 1 1 的输出特征图,该输出特征的像素点,映射到原始图片是 5 5 的区域,其感受野是5。
如果对 5 5 的原始图片直接用蓝色的 5 5 卷积核作用,会输出一个 1 1 的输出特征图,这个像素点映射到原始输入图片是 5 5 的区域,其感受野是5。
同样一个 5 5 的原始图片,经过两层 3 3 的卷积核作用,和经过一层 5 5 的卷积核作用,都得到一个感受野是 5 的输出特征图,这两层 3 3 卷积核和一层 5 * 5 卷积核的特征提取能力是一样的。
对于两层 3 3 的卷积核与一层 5 5 的卷积核的选取,需要考虑带训练参数量和计算量。
假设输入特征图宽、高为x,卷积计算步长为1。显然,两个 3 3 卷积核的参数量为 9 + 9 = 18,小于 5 5 卷积核的 25,前者的参数量更少。
对于两层 3 3 卷积核计算,待训练参数共有18个,每个 3 3 1 的卷积核计算得到一个输出像素点,需要9次乘加计算,两层 3 3 卷积核共需要 次的乘加计算。第一个 3 3 卷积核输出特征图共有 个像素点,每个像素点需要进行 3 3 = 9 次乘加运算, 第二个 3 3 卷积核输出特征图共有 个像素点, 每个像素点同样需要进行 9 次乘加运算,总计算量为 $$ 9 (x – 3 + 1)^2 + 9 * (x – 3 + 1 – 3 + 1)^2 = 18 x^2 – 108x + 180 $$。
对于一层 5 5 卷积核计算,待训练参数共有25个,每个 5 5 1 的卷积核计算得到一个输出像素点,需要25次乘加计算,一层 5 5 卷积核,共需要 次乘加计算。输出特征图共有 个像素点, 每个像素点需要进行 5 5 = 25 次乘加运算,总计算量为 $$ 25 (x – 5 + 1)^2 = 25x^2 – 200x + 400 $$ 。
当输入特征图边长大于10个像素点时,两层 3 3 卷积核比一层 5 5 卷积性能要好,这也就是为什么现在的神经网络在卷积计算中常使用两层 3 3 卷积核替换一层 5 5 卷积核的原因。
对二者的总计算量(乘加运算的次数) 进行对比, ,经过简单数学运算可得 , x 作为特征图的边长,在大多数情况下显然会是一个大于 10 的值(非常简单的 MNIST 数据集的尺寸也达到了 28 28),所以两层 3 3 卷积核的参数量和计算量,在通常情况下都优于一层 5 5 卷积核,尤其是当特征图尺寸比较大的情况下,两层 3 3 卷积核在计算量上的优势会更加明显。
全零填充 卷积计算保持输入特征图的尺寸不变,可以使用全零填充,在输入特征图周围填充0。
如图所示,在 5×5×1 的输入图像周围填 0,在通过 3×3×1的卷积核,进行步长为1的卷积计算,输出特征图仍是 5×5×1。
在 Tensorflow 框架中, 用参数 padding = 'SAME' 或 padding = 'VALID' 表示是否进行全零填充,其对输出特征尺寸大小的影响如下:
上下两行分别代表对输入图像进行全零填充或不进行填充, 对于 5×5×1 的图像来说,当 padding = 'SAME' 时, 步长是1,输出图像边长为 5 / 1 = 5; 当 padding = 'VALID' 时, 核长是3,步长是1,输出图像边长为 (5 - 3 + 1) / 1 = 3。
TF描述卷积计算层 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 tf.keras.layers.Conv2D( filters = 卷积核个数, kernel_size = 卷积核尺寸, strides = 卷积步长, padding = ‘SAME’ or ‘VALID’, activation = ‘relu’ or ‘sigmoid’ or ‘tanh’ or ‘softmax’等 input_shape = (高, 宽, 通道数), ) model = tf.keras.models.Sequential([ Conv2D(6 , 5 , padding='valid' , activation='sigmoid' ), MaxPool2D(2 , 2 ), Conv2D(6 , (5 , 5 ), padding='valid' , activation='sigmoid' ), MaxPool2D(2 , (2 , 2 )), Conv2D(filters=6 , kernel_size=(5 , 5 ), padding='valid' , activation='sigmoid' ), MaxPool2D(pool_size=(2 , 2 ), strides=2 ), Flatten(), Dense(10 , activation='softmax' ) ])
使用此函数构建卷积层时,需要给出的信息有:
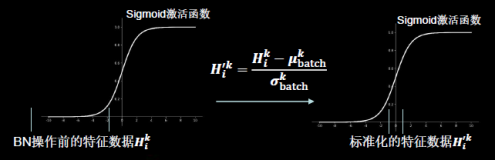
批标准化(Batch Normalization, BN) 神经网络对0附近的数据更敏感,但是随着网络层数的增加,特征数据会出现偏离0均值的情况,标准化可以使数据符合以0为均值,1为标准差的标准正态分布。把偏移的特征数据重新拉回到0附近,常用在卷积操作和激活操作之间。
标准化:使数据符合0均值,1为标准差的分布。
批标准化:对一小批数据(batch),做标准化处理。
批标准化后,第k个卷积核的输出特征图(feature map)中第i个像素点。
可以通过以下公式计算批标准化后的输出特征图:
$ H{i}^{k} $ :批标准化前,第k个卷积核,输出特征图中第 i 个像素点 {batch}^{k} $ : 批标准化前,第k个卷积核, batch张输出特征图中所有像素点平均值
批标准化操作,会让每个像素点进行减均值除以标准差的自更新计算,对于 第k个卷积核batch张输出特征图中所有像素点平均值和标准差,是对 第k个卷积核产生的batch张输出特征图 集体求均值和标准差。
其中 $ \mu{batch}^{k} $ 和 $ \sigma {batch}^{k} $ 就是对第k个卷积核计算出来的batch张输出特征图中的所有像素点求均值和标准差。
BN操作将原本偏移的特征数据重新拉回到0均值,使进入激活函数的数据分布在激活函数线性区,使得输入数据的微小变化更明显体现到激活函数的输出,提升了激活函数对输入数据的区分力。
但是这种简单的特征数据标准化,使特征数据完全满足标准正态分布,集中在激活函数中心的线性区域,使激活函数丧失了非线性特性,因此在BN操作中为每个卷积核引入了两个可训练参数。缩放因子γ和偏移因子β。
反向传播时,缩放因子γ和偏移因子β会与其他待训练参数一同被训练优化,使标准正态分布后的特征数据通过缩放因子γ和偏移因子β优化了特征数据分布的宽窄和偏移量,保证了网络的非线性表达力。
BN层位于卷积层之后,激活层之前。
BN操作函数
tf.keras.layers.BatchNormalization()
1 2 3 4 5 6 7 model = tf.keras.models.Sequential([ Conv2D(filters=6 , kernel_size=(5 , 5 ), padding='same' ), BatchNormalization(), Activation('relu' ), MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ), Dropout(0.2 ), ])
池化(Pooling) 池化操作作用于减少卷积神经网络中特征数据量(降维)。
池化的方法有最大池化和均值池化。
如果用2×2的池化核对输入图片以2为步长进行池化,输出图片将变为输入图片的四分之一大小。
最大池化是用2×2的池化核框住左上4个像素点,选择最大的6输出。步长为2滑动到右上,选择最大的8输出,依次遍历图片。
TF描述池化 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 tf.keras.layers.MaxPool2D( pool_size = 池化核尺寸, strides = 池化步长, padding = 'valid' or 'same' ) tf.keras.layers.AveragePooling2D( pool_size = 池化核尺寸, strides = 池化步长, padding = 'valid' or 'same' ) model = tf.keras.models.Sequential([ Conv2D(filters = 6 , kernel_size = (5 , 5 ), padding = 'same' ), BatchNormalization(), Activation('relu' ), MaxPool2D(pool_size = (2 , 2 ), strides = 2 , padding = 'same' ), Dropout(0.2 ), ])
舍弃(Dropout) 为了缓解神经网络过拟合,在神经网络训练过程中,常将隐藏层的部分神经元按照一定比例从神经网络中临时舍弃。在使用神经网络时,再把所有神经元恢复到神经网络中。
1 2 3 4 5 6 7 8 9 tf.keras.layers.Dropout(舍弃的概率) model = tf.keras.models.Sequential([ Conv2D(filters=6 , kernel_size=(5 , 5 ), padding='same' ), BatchNormalization(), Activation('relu' ), MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ), Dropout(0.2 ), ])
卷积神经网络 卷积神经网络:借助卷积核提取特征后,送入全连接网络。
卷积是什么? 卷积就是特征提取器,就是CBAPD
1 2 3 4 5 6 7 model = tf.keras.models.Sequential([ C Conv2D(filters=6 , kernel_size=(5 , 5 ), padding='same' ), B BatchNormalization(), A Activation('relu' ), P MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ), D Dropout(0.2 ), ])
cifar10数据集 提供 5万张 32 32 像素点的十分类彩色图片和标签,用于训练。 32 像素点的十分类彩色图片和标签,用于测试。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 import tensorflow as tffrom matplotlib import pyplot as pltimport numpy as npnp.set_printoptions(threshold=np.inf) cifar10 = tf.keras.datasets.cifar10 (x_train, y_train), (x_test, y_test) = cifar10.load_data() plt.imshow(x_train[0 ]) plt.show() print ("x_train[0]:\n" , x_train[0 ])print ("y_train[0]:\n" , y_train[0 ])print ("x_train.shape:\n" , x_train.shape)print ("y_train.shape:\n" , y_train.shape)print ("x_test.shape:\n" , x_test.shape)print ("y_test.shape:\n" , y_test.shape)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 [[177 144 116] [168 129 94] [179 142 87] [188 149 67] [202 168 68] [218 189 76] [218 191 72] [207 181 70] [191 163 79] [175 143 82] [166 132 86] [163 128 92] [163 127 94] [161 123 92] [153 114 84] [159 120 90] [162 124 93] [149 116 91] [140 104 83] [148 103 77] [161 105 69] [144 95 55] [112 90 59] [119 91 58] [130 96 65] [120 87 59] [ 92 67 46] [103 78 57] [170 140 104] [216 184 140] [151 118 84] [123 92 72]]] y_train[0]: [6] x_train.shape: (50000, 32, 32, 3) y_train.shape: (50000, 1) x_test.shape: (10000, 32, 32, 3) y_test.shape: (10000, 1)
卷积神经网络搭建示例 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 import tensorflow as tfimport osimport numpy as npfrom matplotlib import pyplot as pltfrom tensorflow.keras.layers import Conv2D, BatchNormalization, Activation, MaxPool2D, Dropout, Flatten, Densefrom tensorflow.keras import Modelnp.set_printoptions(threshold=np.inf) cifar10 = tf.keras.datasets.cifar10 (x_train, y_train), (x_test, y_test) = cifar10.load_data() x_train, x_test = x_train / 255.0 , x_test / 255.0 class Baseline (Model ): def __init__ (self ): super (Baseline, self).__init__() self.c1 = Conv2D(filters=6 , kernel_size=(5 , 5 ), padding='same' ) self.b1 = BatchNormalization() self.a1 = Activation('relu' ) self.p1 = MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ) self.d1 = Dropout(0.2 ) self.flatten = Flatten() self.f1 = Dense(128 , activation='relu' ) self.d2 = Dropout(0.2 ) self.f2 = Dense(10 , activation='softmax' ) def call (self, x ): x = self.c1(x) x = self.b1(x) x = self.a1(x) x = self.p1(x) x = self.d1(x) x = self.flatten(x) x = self.f1(x) x = self.d2(x) y = self.f2(x) return y model = Baseline() model.compile (optimizer='adam' , loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=False ), metrics=['sparse_categorical_accuracy' ]) checkpoint_save_path = "./checkpoint/Baseline.ckpt" if os.path.exists(checkpoint_save_path + '.index' ): print ('-------------load the model-----------------' ) model.load_weights(checkpoint_save_path) cp_callback = tf.keras.callbacks.ModelCheckpoint(filepath=checkpoint_save_path, save_weights_only=True , save_best_only=True ) history = model.fit(x_train, y_train, batch_size=32 , epochs=5 , validation_data=(x_test, y_test), validation_freq=1 , callbacks=[cp_callback]) model.summary() file = open ('./weights.txt' , 'w' ) for v in model.trainable_variables: file.write(str (v.name) + '\n' ) file.write(str (v.shape) + '\n' ) file.write(str (v.numpy()) + '\n' ) file.close() acc = history.history['sparse_categorical_accuracy' ] val_acc = history.history['val_sparse_categorical_accuracy' ] loss = history.history['loss' ] val_loss = history.history['val_loss' ] plt.subplot(1 , 2 , 1 ) plt.plot(acc, label='Training Accuracy' ) plt.plot(val_acc, label='Validation Accuracy' ) plt.title('Training and Validation Accuracy' ) plt.legend() plt.subplot(1 , 2 , 2 ) plt.plot(loss, label='Training Loss' ) plt.plot(val_loss, label='Validation Loss' ) plt.title('Training and Validation Loss' ) plt.legend() plt.show()
LeNet LeCun Y, Bottou L, Bengio Y, et al. Gradient-based learning applied to document recognition.Proceedings of the IEEE, 1998, 86(11): 2278-2324.
通过共享卷积核减少了网络参数。
输入: 3232 35 5,步长: 1,填充: valid )
C3卷积5 5,步长: 1,填充: valid )
Flatten
统计卷积神经网络层数时,一般只统计卷积计算层和全连接计算层,其余操作可以认为是卷积计算层的附属。
LeNet一共有五层网络
1 2 3 4 5 6 7 8 9 10 11 12 13 class LeNet5 (Model ): def __init__ (self ): super (LeNet5, self).__init__() self.c1 = Conv2D(filters=6 , kernel_size=(5 , 5 ), activation='sigmoid' ) self.p1 = MaxPool2D(pool_size=(2 , 2 ), strides=2 ) self.c2 = Conv2D(filters=16 , kernel_size=(5 , 5 ), activation='sigmoid' ) self.p2 = MaxPool2D(pool_size=(2 , 2 ), strides=2 ) self.flatten = Flatten() self.f1 = Dense(120 , activation='sigmoid' ) self.f2 = Dense(84 , activation='sigmoid' ) self.f3 = Dense(10 , activation='softmax' )
AlexNet Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton. ImageNet Classification with Deep Convolutional NeuralNetworks. In NIPS, 2012.
使用relu激活函数提升激活速度,使用了dropout缓解了过拟合,
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 class AlexNet8 (Model ): def __init__ (self ): super (AlexNet8, self).__init__() self.c1 = Conv2D(filters=96 , kernel_size=(3 , 3 )) self.b1 = BatchNormalization() self.a1 = Activation('relu' ) self.p1 = MaxPool2D(pool_size=(3 , 3 ), strides=2 ) self.c2 = Conv2D(filters=256 , kernel_size=(3 , 3 )) self.b2 = BatchNormalization() self.a2 = Activation('relu' ) self.p2 = MaxPool2D(pool_size=(3 , 3 ), strides=2 ) self.c3 = Conv2D(filters=384 , kernel_size=(3 , 3 ), padding='same' , activation='relu' ) self.c4 = Conv2D(filters=384 , kernel_size=(3 , 3 ), padding='same' , activation='relu' ) self.c5 = Conv2D(filters=256 , kernel_size=(3 , 3 ), padding='same' , activation='relu' ) self.p3 = MaxPool2D(pool_size=(3 , 3 ), strides=2 ) self.flatten = Flatten() self.f1 = Dense(2048 , activation='relu' ) self.d1 = Dropout(0.5 ) self.f2 = Dense(2048 , activation='relu' ) self.d2 = Dropout(0.5 ) self.f3 = Dense(10 , activation='softmax' )
VGGNet K. Simonyan, A. Zisserman. Very Deep Convolutional Networks for Large-Scale Image Recognition.In ICLR,2015
适合硬件加速
16层VGG网络
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 class VGG16 (Model ): def __init__ (self ): super (VGG16, self).__init__() self.c1 = Conv2D(filters=64 , kernel_size=(3 , 3 ), padding='same' ) self.b1 = BatchNormalization() self.a1 = Activation('relu' ) self.c2 = Conv2D(filters=64 , kernel_size=(3 , 3 ), padding='same' , ) self.b2 = BatchNormalization() self.a2 = Activation('relu' ) self.p1 = MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ) self.d1 = Dropout(0.2 ) self.c3 = Conv2D(filters=128 , kernel_size=(3 , 3 ), padding='same' ) self.b3 = BatchNormalization() self.a3 = Activation('relu' ) self.c4 = Conv2D(filters=128 , kernel_size=(3 , 3 ), padding='same' ) self.b4 = BatchNormalization() self.a4 = Activation('relu' ) self.p2 = MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ) self.d2 = Dropout(0.2 ) self.c5 = Conv2D(filters=256 , kernel_size=(3 , 3 ), padding='same' ) self.b5 = BatchNormalization() self.a5 = Activation('relu' ) self.c6 = Conv2D(filters=256 , kernel_size=(3 , 3 ), padding='same' ) self.b6 = BatchNormalization() self.a6 = Activation('relu' ) self.c7 = Conv2D(filters=256 , kernel_size=(3 , 3 ), padding='same' ) self.b7 = BatchNormalization() self.a7 = Activation('relu' ) self.p3 = MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ) self.d3 = Dropout(0.2 ) self.c8 = Conv2D(filters=512 , kernel_size=(3 , 3 ), padding='same' ) self.b8 = BatchNormalization() self.a8 = Activation('relu' ) self.c9 = Conv2D(filters=512 , kernel_size=(3 , 3 ), padding='same' ) self.b9 = BatchNormalization() self.a9 = Activation('relu' ) self.c10 = Conv2D(filters=512 , kernel_size=(3 , 3 ), padding='same' ) self.b10 = BatchNormalization() self.a10 = Activation('relu' ) self.p4 = MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ) self.d4 = Dropout(0.2 ) self.c11 = Conv2D(filters=512 , kernel_size=(3 , 3 ), padding='same' ) self.b11 = BatchNormalization() self.a11 = Activation('relu' ) self.c12 = Conv2D(filters=512 , kernel_size=(3 , 3 ), padding='same' ) self.b12 = BatchNormalization() self.a12 = Activation('relu' ) self.c13 = Conv2D(filters=512 , kernel_size=(3 , 3 ), padding='same' ) self.b13 = BatchNormalization() self.a13 = Activation('relu' ) self.p5 = MaxPool2D(pool_size=(2 , 2 ), strides=2 , padding='same' ) self.d5 = Dropout(0.2 ) self.flatten = Flatten() self.f1 = Dense(512 , activation='relu' ) self.d6 = Dropout(0.2 ) self.f2 = Dense(512 , activation='relu' ) self.d7 = Dropout(0.2 ) self.f3 = Dense(10 , activation='softmax' )
卷积核的个数从64到128到256到512,逐渐增加,因为越靠后,特征图尺寸越小,通过增加卷积核的个数,增加了特征图深度,保持了信息的承载能力。
InceptionNet Szegedy C, Liu W, Jia Y, et al. Going Deeper with Convolutions. In CVPR, 2015.
InceptionNet引入了Inception结构块,在同一层网络内使用不同尺寸的卷积核,提升了模型感知力,使用了批标准化,缓解了梯度消失。
Inception结构块在同一层网络中使用了多个尺寸的卷积核,可以提取不同尺寸的特征,通过1 × 1卷积核,作用到输入特征图的每个像素点。通过设定少于输入特征图深度的1 × 1卷积核个数,减少了输出特征图深度,起到了降维的作用,减少了参数量和计算量。
一个Inception结构块包含四个分支,
送到卷积连接器的特征数据尺寸相同,卷积连接器会把收到的这四路特征数据按深度方向拼接,形成Inception结构块的输出。
Inception结构块中的卷积操作均采用了CBA结构,先卷积,再BN,再采用relu激活函数,所以将其定义成一个新的类ConvBNRelu,可以减少代码长度。
1 2 3 4 5 6 7 8 9 10 11 12 class ConvBNRelu (Model ): def __init__ (self, ch, kernelsz=3 , strides=1 , padding='same' ): super (ConvBNRelu, self).__init__() self.model = tf.keras.models.Sequential([ Conv2D(ch, kernelsz, strides=strides, padding=padding), BatchNormalization(), Activation('relu' ) ]) def call (self, x ): x = self.model(x, training=False ) return x
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 class InceptionBlk (Model ): def __init__ (self, ch, strides=1 ): super (InceptionBlk, self).__init__() self.ch = ch self.strides = strides self.c1 = ConvBNRelu(ch, kernelsz=1 , strides=strides) self.c2_1 = ConvBNRelu(ch, kernelsz=1 , strides=strides) self.c2_2 = ConvBNRelu(ch, kernelsz=3 , strides=1 ) self.c3_1 = ConvBNRelu(ch, kernelsz=1 , strides=strides) self.c3_2 = ConvBNRelu(ch, kernelsz=5 , strides=1 ) self.p4_1 = MaxPool2D(3 , strides=1 , padding='same' ) self.c4_2 = ConvBNRelu(ch, kernelsz=1 , strides=strides) def call (self, x ): x1 = self.c1(x) x2_1 = self.c2_1(x) x2_2 = self.c2_2(x2_1) x3_1 = self.c3_1(x) x3_2 = self.c3_2(x3_1) x4_1 = self.p4_1(x) x4_2 = self.c4_2(x4_1) x = tf.concat([x1, x2_2, x3_2, x4_2], axis=3 ) return x
每两个inception结构块组合成一个block,每个block中第一个Inception结构块卷积步长是2,第二个Inception结构块卷积步长是1,这使得第一个Inception结构块输出特征图尺寸减半。因此将输出图特征图深度加深,尽可能保证特征抽取中信息的承载量一致,block_0 设置的通道数是16,经过了四个分支,输出的深度为 4 × 16 = 64。在这里给通道数加倍了,所以 block_1 通道数是 block_0 通道数的两倍,是32,同样,经过了四个分支,输出深度是 4 × 32 = 128。128个数据会被送进平均池化,送进十个分类的全连接,这里实例化了Inception10的类,指定了InceptionNet的block数是2,也就是 block_0 和 block_1 ,而后网络指定分几类。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 class Inception10 (Model ): def __init__ (self, num_blocks, num_classes, init_ch=16 , **kwargs ): super (Inception10, self).__init__(**kwargs) self.in_channels = init_ch self.out_channels = init_ch self.num_blocks = num_blocks self.init_ch = init_ch self.c1 = ConvBNRelu(init_ch) self.blocks = tf.keras.models.Sequential() for block_id in range (num_blocks): for layer_id in range (2 ): if layer_id == 0 : block = InceptionBlk(self.out_channels, strides=2 ) else : block = InceptionBlk(self.out_channels, strides=1 ) self.blocks.add(block) self.out_channels *= 2 self.p1 = GlobalAveragePooling2D() self.f1 = Dense(num_classes, activation='softmax' ) def call (self, x ): x = self.c1(x) x = self.blocks(x) x = self.p1(x) y = self.f1(x) return y model = Inception10(num_blocks=2 , num_classes=10 )
训练时候可以调节batchsize大小,使显卡达到70%利用率即可。
ResNet Kaiming He, Xiangyu Zhang, Shaoqing Ren. Deep Residual Learning for Image Recognition. In CPVR,2016
ResNet提出了层间残差跳连,引入前方信息,缓解梯度消失,使神经网络层数增加成为可能。
通过加深网络层数,取得了越来越好的效果。
然56层卷积网络错误率要高于20层卷积网络。
单纯的堆叠网络层数会使得网络模型退化,以至于后边特征丢失了前边特征的原本模样。
于是使用跳连线,将前边特征直接接到了后边,使得 H(x) 包含了堆叠卷积的非线性输出 F(x) ,和跳过这两层堆叠卷积,直接连接过来的恒等映射x,让它们的对应元素相加,这一操作有效缓解了神经网络模型堆叠导致的退化,使得神经网络可以向更深层级发展。
Inception块中的 “+” 是沿深度方向叠加(千层蛋糕层数叠加)
ResNet块中有两种情况,一种情况用图中的实线表示,这种情况两层堆叠卷积,没有改变特征图的维度,也就是它们特征图的个数、高、宽和深度都相同,可以直接将 F(x) 与 x 相加。
ResNet块有两种形式,一种在堆叠卷积前后维度相同,另一种在堆叠卷积前后维度不同。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 class ResnetBlock (Model ): def __init__ (self, filters, strides=1 , residual_path=False ): super (ResnetBlock, self).__init__() self.filters = filters self.strides = strides self.residual_path = residual_path self.c1 = Conv2D(filters, (3 , 3 ), strides=strides, padding='same' , use_bias=False ) self.b1 = BatchNormalization() self.a1 = Activation('relu' ) self.c2 = Conv2D(filters, (3 , 3 ), strides=1 , padding='same' , use_bias=False ) self.b2 = BatchNormalization() if residual_path: self.down_c1 = Conv2D(filters, (1 , 1 ), strides=strides, padding='same' , use_bias=False ) self.down_b1 = BatchNormalization() self.a2 = Activation('relu' ) def call (self, inputs ): residual = inputs x = self.c1(inputs) x = self.b1(x) x = self.a1(x) x = self.c2(x) y = self.b2(x) if self.residual_path: residual = self.down_c1(inputs) residual = self.down_b1(residual) out = self.a2(y + residual) return out
左侧给出的框图是ResNet18用CBAPD表示的结构,
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 class ResNet18 (Model ): def __init__ (self, block_list, initial_filters=64 ): super (ResNet18, self).__init__() self.num_blocks = len (block_list) self.block_list = block_list self.out_filters = initial_filters self.c1 = Conv2D(self.out_filters, (3 , 3 ), strides=1 , padding='same' , use_bias=False ) self.b1 = BatchNormalization() self.a1 = Activation('relu' ) self.blocks = tf.keras.models.Sequential() for block_id in range (len (block_list)): for layer_id in range (block_list[block_id]): if block_id != 0 and layer_id == 0 : block = ResnetBlock(self.out_filters, strides=2 , residual_path=True ) else : block = ResnetBlock(self.out_filters, residual_path=False ) self.blocks.add(block) self.out_filters *= 2 self.p1 = tf.keras.layers.GlobalAveragePooling2D() self.f1 = tf.keras.layers.Dense(10 , activation='softmax' , kernel_regularizer=tf.keras.regularizers.l2()) def call (self, inputs ): x = self.c1(inputs) x = self.b1(x) x = self.a1(x) x = self.blocks(x) x = self.p1(x) y = self.f1(x) return y model = ResNet18([2 , 2 , 2 , 2 ])
经典卷积及网络小结